文章来源于互联网:无人机+卫星通信+红外夜视:仰望U8「越野玩家版」展示三大黑科技
凭借易四方、云辇-P 等前沿技术,可城市可越野,全场景、多路况的多功能定位,仰望 U8 打破了以往传统燃油硬派越野车的场景限制,带来了全场景、多路况适配的驾控性和舒适性。这款车从曝光到上市一直受到人们的关注,也已经创造了百万级 SUV 的交付记录。
作为一款前所未有的产品,仰望 U8 的原地掉头、浮水等技术和能力早已经火出圈,是经常被谈论的话题。但与此同时,它搭载的很多智能化技术却经常被忽略。
近日,我们近距离体验了一下仰望 U8 越野玩家版的领先智能化能力。

仰望 U8「越野玩家版」在上个月的北京车展上正式上市,售价为 109.8 万起。这款车型采用 2.0T 发动机+易四方四轮四电机,以及云辇-P 智能液压车身控制系统,CLTC 纯电续航为 180km,综合续航 1000km,和此前的版本一样,拥有原地掉头、浮水模式等驾驶模式。
它还突出了三个特殊能力:车载无人机、卫星通信和红外夜视系统。
三大特殊能力
在新版本车型上,比亚迪和大疆联合开发,首创了深度融合的车载无人机系统。在硬件层面,其包含了定制款的大疆无人机和比亚迪研发的车载机舱。在软件层面,两方联手根据越野车的实际工作场景开发了专属策略,不仅可以使用专属手柄,也可以直接在手机、车机中控屏上进行全部操作。
U8 越野玩家版的无人机舱中储备了三块电池,可以自动快速充换电。在使用时,车载无人机可以实现一键起飞、一键返航。无人机起飞后默认处于自动伴飞模式,拍摄过程中可以实现智能运镜。

为了解决越野穿越过程中可能会遇到的通信保障问题,比亚迪与中国电信(天通卫星通讯)合作,为仰望 U8 越野玩家版标配了车载卫星通信。该功能可以在沙漠、隔壁等无人区环境中实现双向实时卫星通话,或双向发送短信。
为了应对越野中的极限场景,卫星通信模块采用了车规级标准,工作温度覆盖-40℃到 85℃,卫星通信时天线对星的仰角也达到正负 70 度,可以全姿态自动对星,进行快速连接。

比亚迪表示,该卫星通信模块可以在汽车行驶中使用,也可以作为热点通过 WiFi 把信号分享给手机进行通话,特殊情况下还可以拆下来离开车辆使用。当车辆的安全气囊弹出后,卫星通讯也会即刻联动救援中心。
此外,比亚迪在仰望 U8 越野玩家版上标配了远近红外夜视系统。它结合了当前业界主流的单远红外、单近红外技术,为用户带来了全天候,全场景的智能辅助系统。在识别前向人和动物的同时还具备碰撞预警功能,可以有效识别意外情况。
整车智能化,重新定义智能汽车
实际上,在仰望 U8 上,智能化的配置还有不少,包括但不限于比亚迪与高通联合定制的 4nm 5G 芯片、仰望 Link 智能网联系统、无边界五屏联动功能、全场景智能语音、智能随动座椅等待。
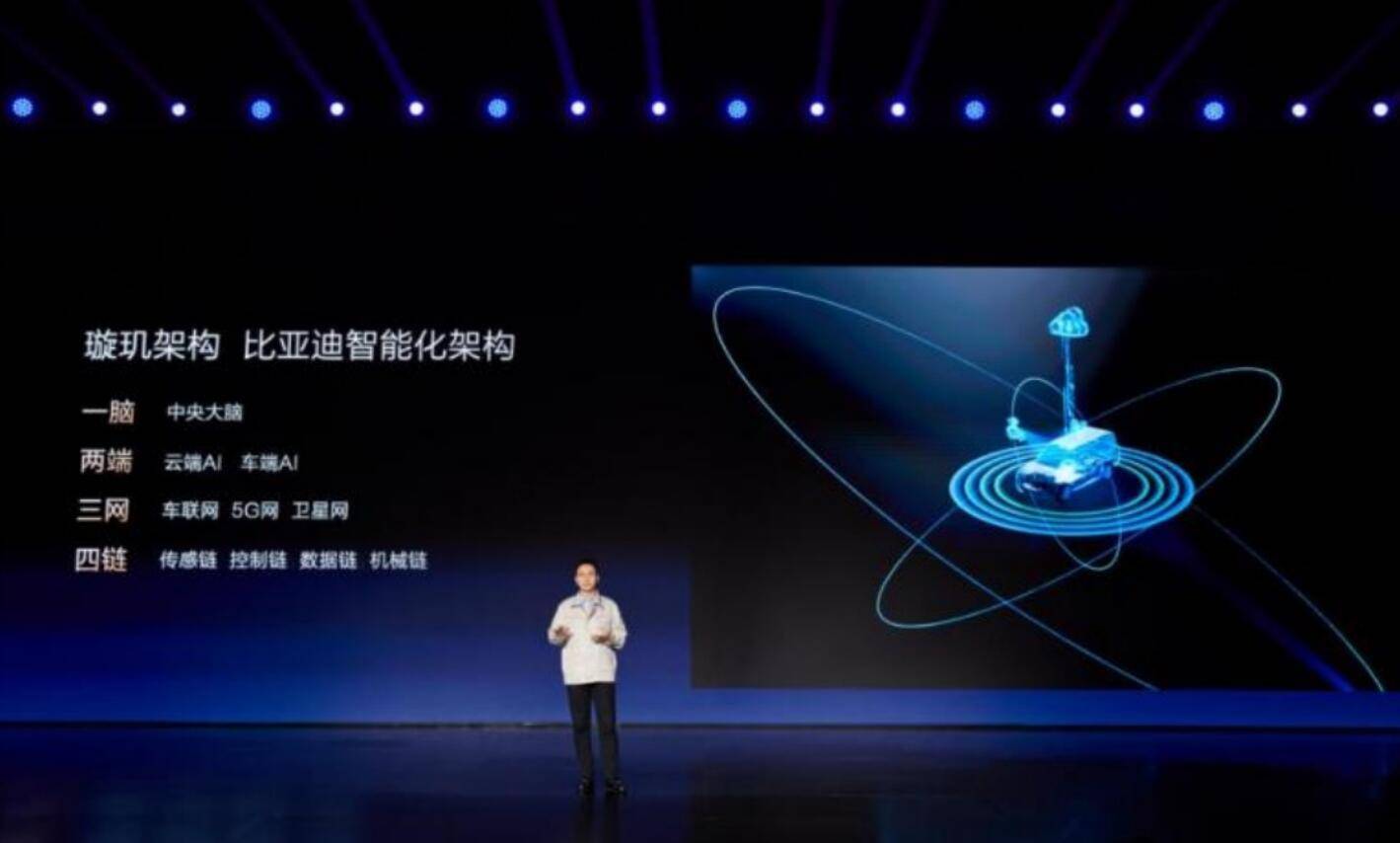
对于汽车的智能化,比亚迪有着独特的思考。在今年 1 月的比亚迪梦想日上,比亚迪提出整车智能战略——不同于目前行业把汽车智能化和智舱智驾画等号,比亚迪的智能化不止智舱智驾,而是统一融合,重新定义智能汽车。

通过璇玑智能化架构,比亚迪实现了电动化与智能化的高效融合,让驾乘体验更安全、更高效,同时也更个性化。整车智能可实现实时捕捉内外部环境的变化,在毫秒之间将信息汇总反馈到单个「大脑」进行思考决策,迅速调节车辆状态,大幅提升驾乘安全性和舒适性。与此同时,整车智能让车更懂人,实现更多的个性化设置,做到千人千面。
璇玑架构作为行业首个智电融合的智能化架构,是比亚迪整车智能的重要组成部分,它让汽车拥有了智能化的「大脑」和「神经网络」,使其可以像高级智慧生命体一样全面感知、集中思考、精准控制和协同执行。
与此同时,比亚迪还推出行业首创双循环多模态 AI——璇玑 AI 大模型,首次将人工智能应用到车辆全领域。它拥有业界最庞大的数据底座、行业领先的样本量和高算力,覆盖了整车三百多个场景,赋予整车智能持续进化的能力。
比亚迪全球首创的易四方泊车是在整车智能的基础上,将易四方技术与智驾的泊车技术完美融合,结合四电机灵活平稳的控制能力,可以自动实现精准旋转入库,不管多难停的车位,都能「一把进」。
整车智能的实现一方面得益于比亚迪全栈自研、垂直整合带来的战略优势,另一方面也是比亚迪在电动化领域积累带来的质变。目前,比亚迪实现的智能化涵盖整车智能、智能驾驶、智能泊车、智能座舱等一系列技术。
作为国产豪华车的集大成之作,仰望 U8 的上市重新定义了硬派越野标准。现在,追求越野个性化和独特豪华品味的人群有了新的选择。
文章来源于互联网:无人机+卫星通信+红外夜视:仰望U8「越野玩家版」展示三大黑科技

