文章来源于互联网:穹彻智能-上交大最新Nature子刊速递:解析深度学习驱动的视触觉动态重建方案
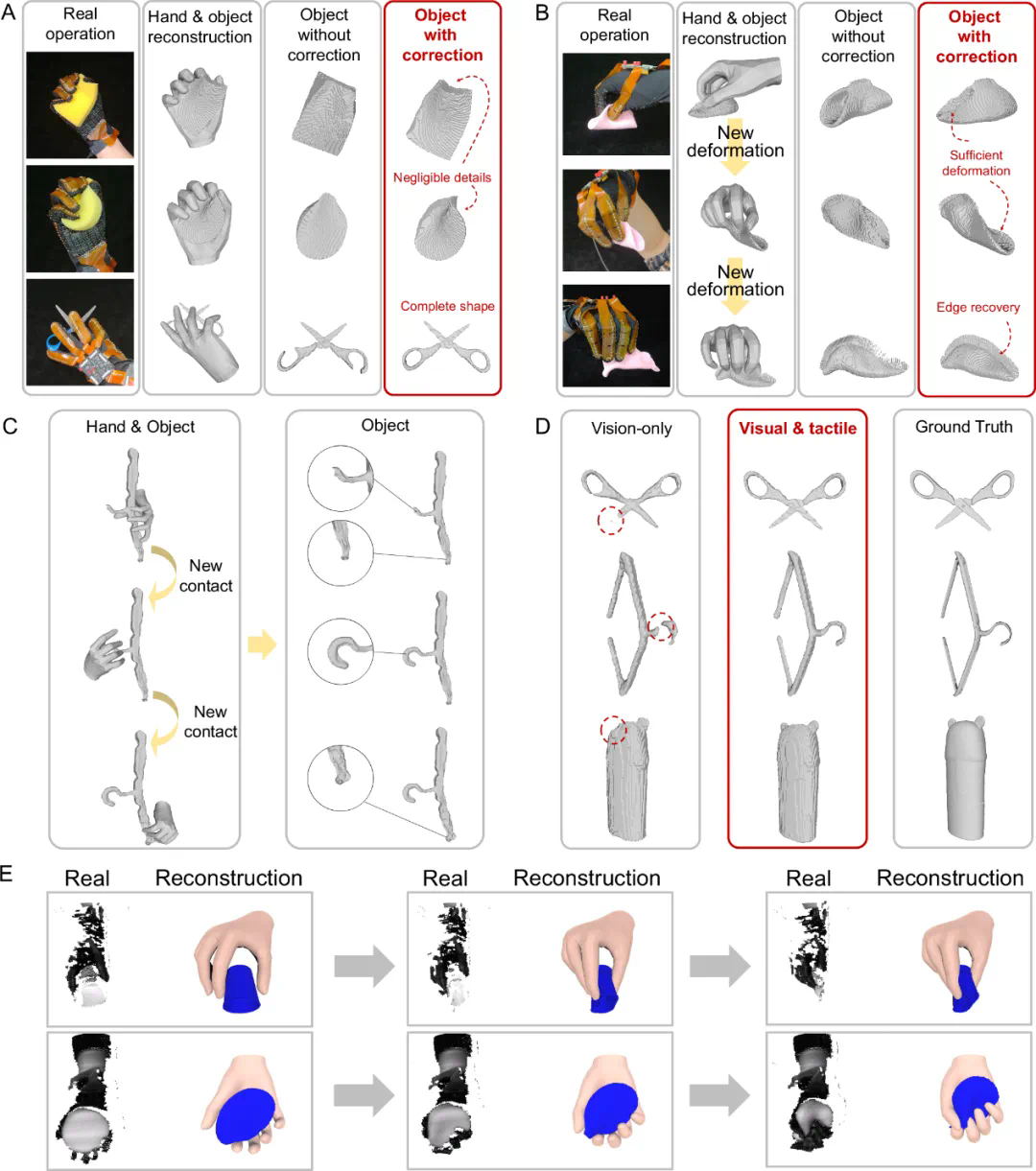
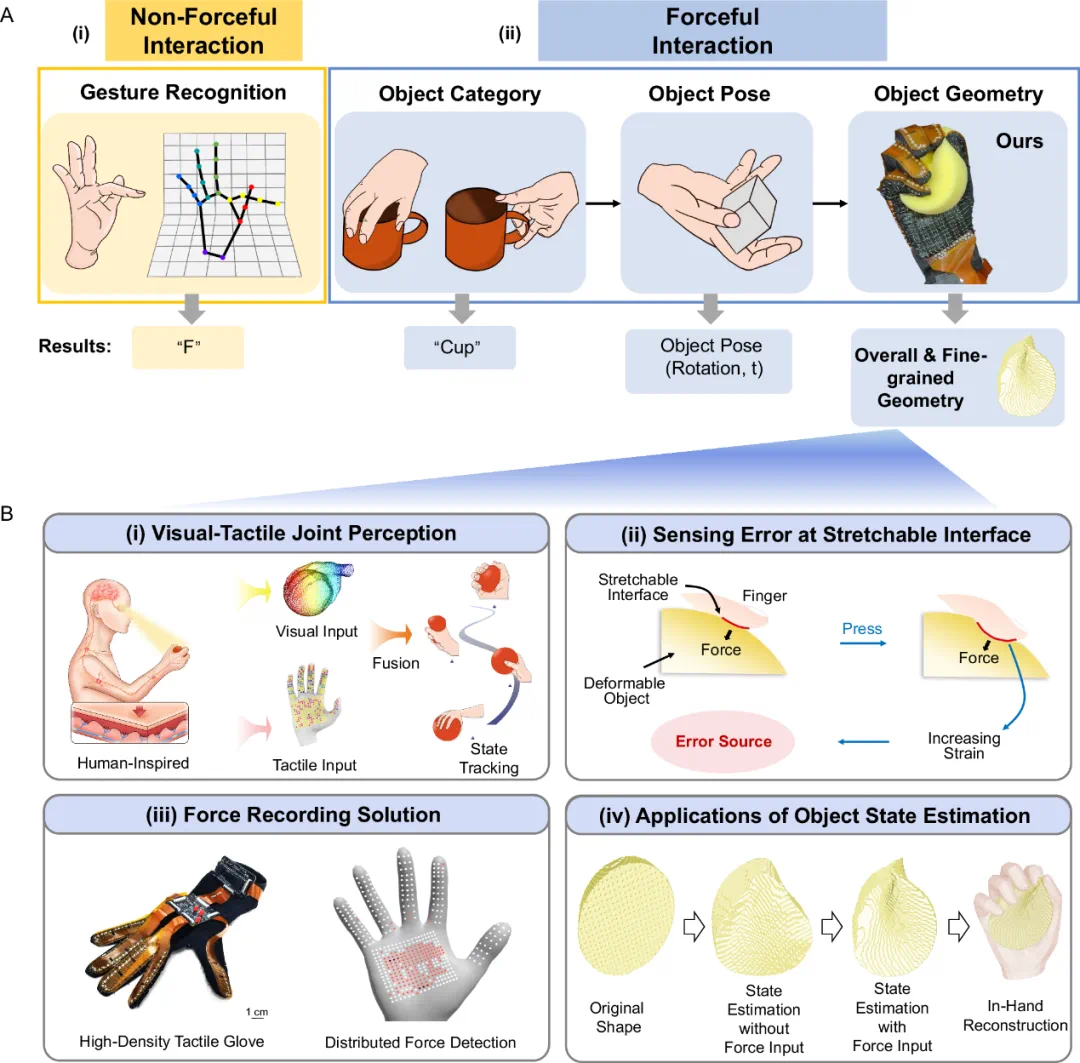
随着人形机器人技术的迅猛发展,如何有效获取高质量的操作数据成为核心挑战。鉴于人类操作行为的复杂性和多样性,如何从真实世界中精准捕捉手与物体交互的完整状态,成为推动人形机器人操作技能学习的关键所在。面对这一挑战,穹彻智能携手上海交通大学卢策吾和刘景全团队,创新性地提出了名为 ViTaM 的视觉-触觉联合记录和追踪系统。该系统包括高密度可伸缩触觉手套和基于视觉-触觉的联合学习框架,不仅在触觉手套的设计和制造上实现了技术突破,更通过视觉与触觉的深度融合,为理解手物交互过程状态提供了全新的视角和强大工具。
-
论文名称:Capturing forceful interaction with deformable objects using a deep learning-powered stretchable tactile array -
论文链接:https://www.nature.com/articles/s41467-024-53654-y -
项目地址:https://github.com/jeffsonyu/ViTaM


-
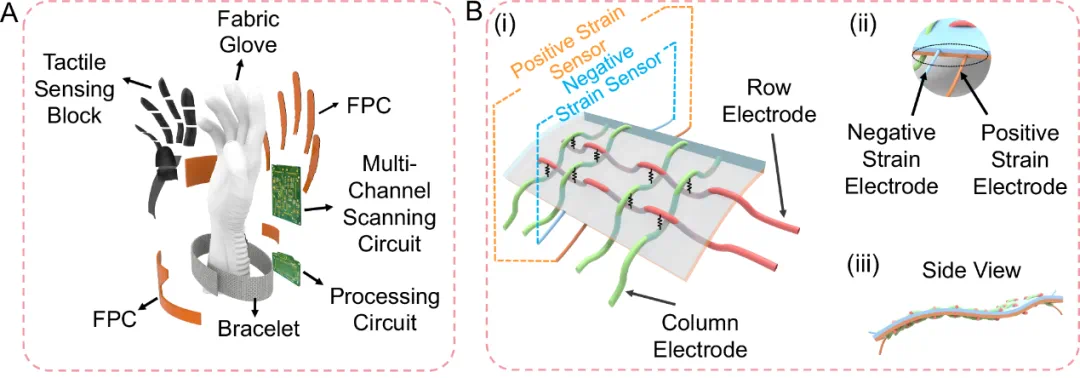
高效的数据传输与灵活的系统扩展:手套的设计采用模块化结构,便于根据不同需求调整传感器的密度或进行拆卸。其中,三种类型的 FPC 分别连接手指与掌心传感区域,支持最大 1152 个传感单元(原型系统配备 456 个传感单元)。 -
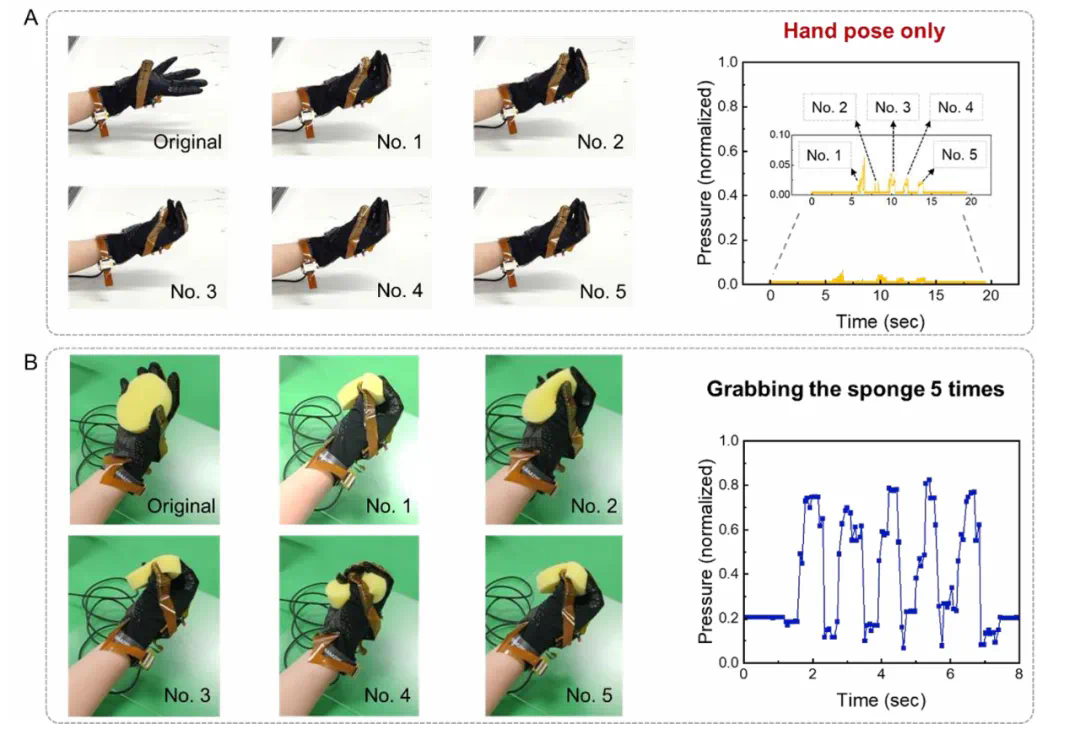
触觉传感的高精度与准确性:系统包含了力传感电路和应变干扰检测电路,以保证触觉数据的高精度采集与处理,这些传感器通过导电织物线路连接,形成行列电极阵列,以实现准确的力感应和应变测量。 -
人体工学舒适性:为了提高触觉手套的舒适性和适配性,采用了先进的织物传感技术,避免了传统方法中常见的胶层分层问题。每个触觉传感模块由正负应变传感器和力传感器阵列构成(图 2B)。这种全织法组装方式不仅提高了手套的耐用性和穿戴感,还使得手套更加适应复杂的手部运动和操作环境。 -
低成本与量产潜力:在系统的整体设计中,触觉手套经过多次测试验证,原型版的准确率达到 97.15%,证明其足以满足大多数人机交互应用的需求。成本方面,触觉手套的单价为 3.38 美元,而硬件总成本为 26.63 美元,使得该产品具备了较高的性价比,并有望广泛推广。通过加工工艺的逐步简化以及生产自动化技术的实现,该触觉手套在未来有着较大的量产潜力。