文章来源于互联网:ICLR 2025 Spotlight | 让城市「动」起来!DynamicCity突破4D大场景生成技术边界

AIxiv专栏是机器之心发布学术、技术内容的栏目。过去数年,机器之心AIxiv专栏接收报道了2000多篇内容,覆盖全球各大高校与企业的顶级实验室,有效促进了学术交流与传播。如果您有优秀的工作想要分享,欢迎投稿或者联系报道。投稿邮箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com

-
论文:https://arxiv.org/abs/2410.18084
-
主页:https://dynamic-city.github.io
-
代码:https://github.com/3DTopia/DynamicCity
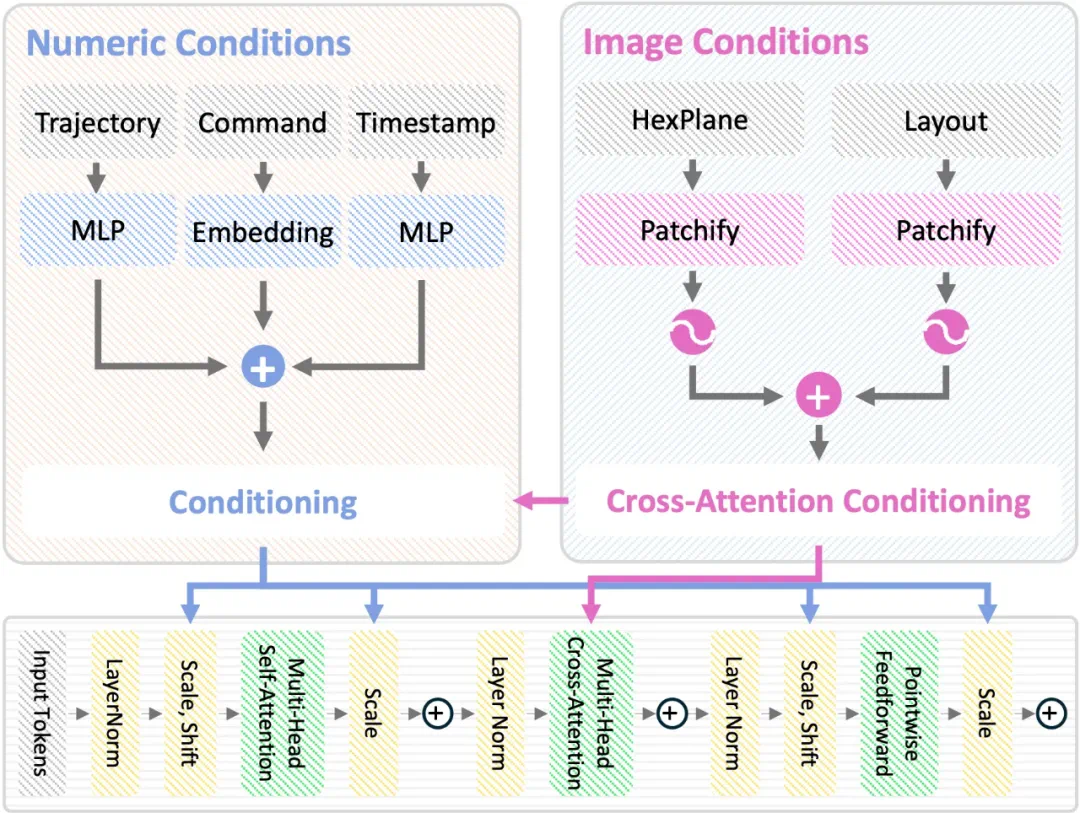
 ,其中
,其中 分别表示时间、空间维度,而
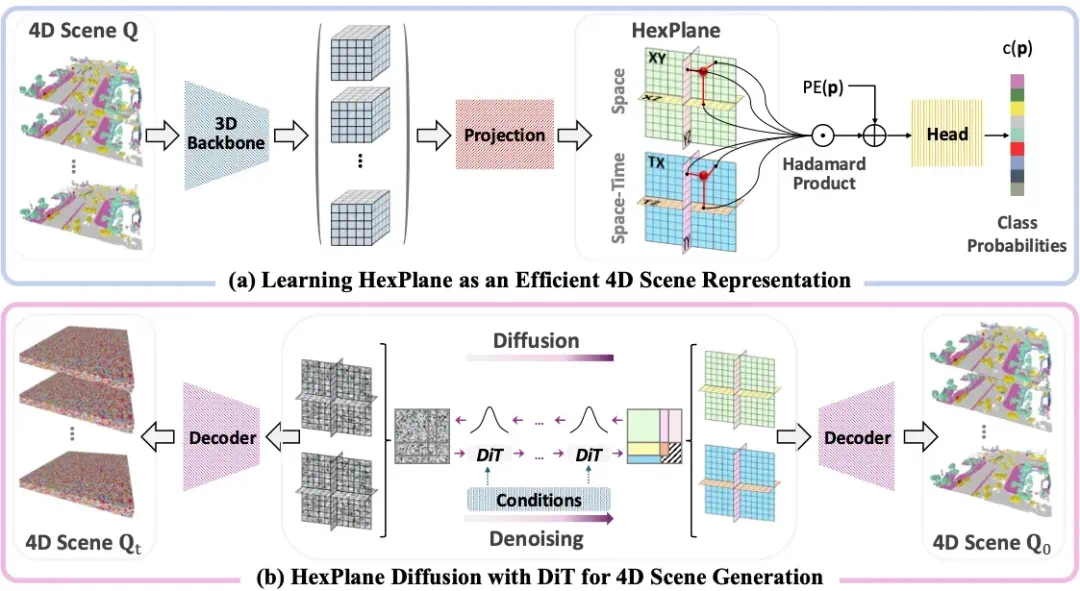
分别表示时间、空间维度,而 代表特征通道数。VAE 将 4D 数据进行降维成 HexPlane:
代表特征通道数。VAE 将 4D 数据进行降维成 HexPlane:
 负责建模空间维度信息,
负责建模空间维度信息, 负责建模时空关联。这一映射成功将 4D 表达压缩至 2D 空间,使得后续的生成任务更高效。
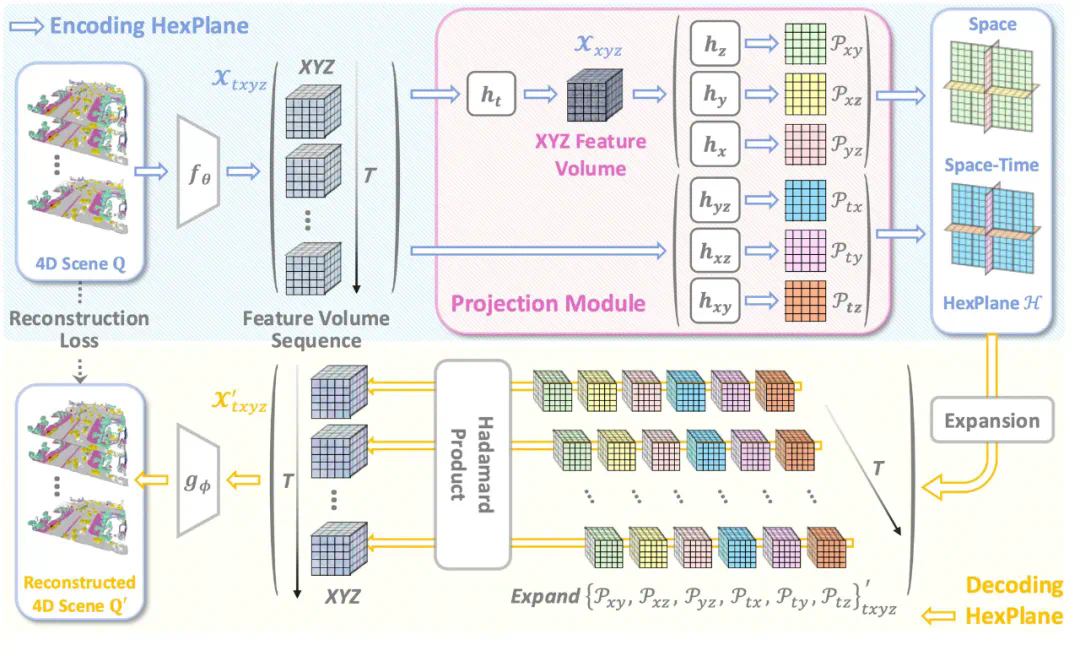
负责建模时空关联。这一映射成功将 4D 表达压缩至 2D 空间,使得后续的生成任务更高效。 ,将 4D 特征投影到 2D 平面,每一个投影网络会压缩一个或两个维度。
,将 4D 特征投影到 2D 平面,每一个投影网络会压缩一个或两个维度。 首先进行时间维度压缩,而后三个小型网络分别提取空间特征平面
首先进行时间维度压缩,而后三个小型网络分别提取空间特征平面 。而时空特征平面
。而时空特征平面  则是通过三个小型网络直接从 4D 特征中提取得到。
则是通过三个小型网络直接从 4D 特征中提取得到。
 生成完整 4D 语义场景。
生成完整 4D 语义场景。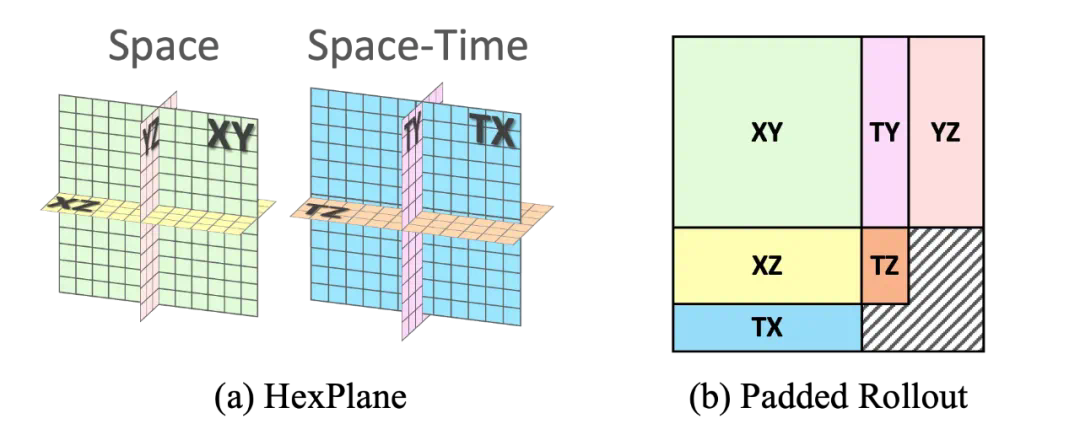


DynamicCity是上海人工智能实验室、卡耐基梅隆大学、新加坡国立大学和新加坡南洋理工大学团队的合作项目。
本文第一作者卞恒玮,系卡耐基梅隆大学硕士研究生,工作完成于其在上海人工智能实验室实习期间,通讯作者为上海人工智能实验室青年科学家潘亮博士。
其余作者分别为新加坡国立大学计算机系博士生孔令东,新加坡南洋理工大学谢浩哲博士、刘子纬教授,以及上海人工智能实验室乔宇教授。
文章来源于互联网:ICLR 2025 Spotlight | 让城市「动」起来!DynamicCity突破4D大场景生成技术边界

